作者:日金精
发布时间:2025-07-26
访问量:562
在智能制造和智慧物流持续深化的今天,物料搬运这一“隐形成本”正在受到越来越多的关注。传统叉车虽然在工业搬运中发挥了不可替代的作用,但其依赖人工操作、运行效率不稳定、安全隐患高等问题逐渐暴露。为了解决这些痛点,叉车式机器人应运而生。那么,叉车式机器人究竟能替代哪些传统环节?它的技术原理和使用边界在哪里?又该如何部署与选型?本文将围绕这些核心问题展开深入探讨。
一、什么是叉车式机器人?
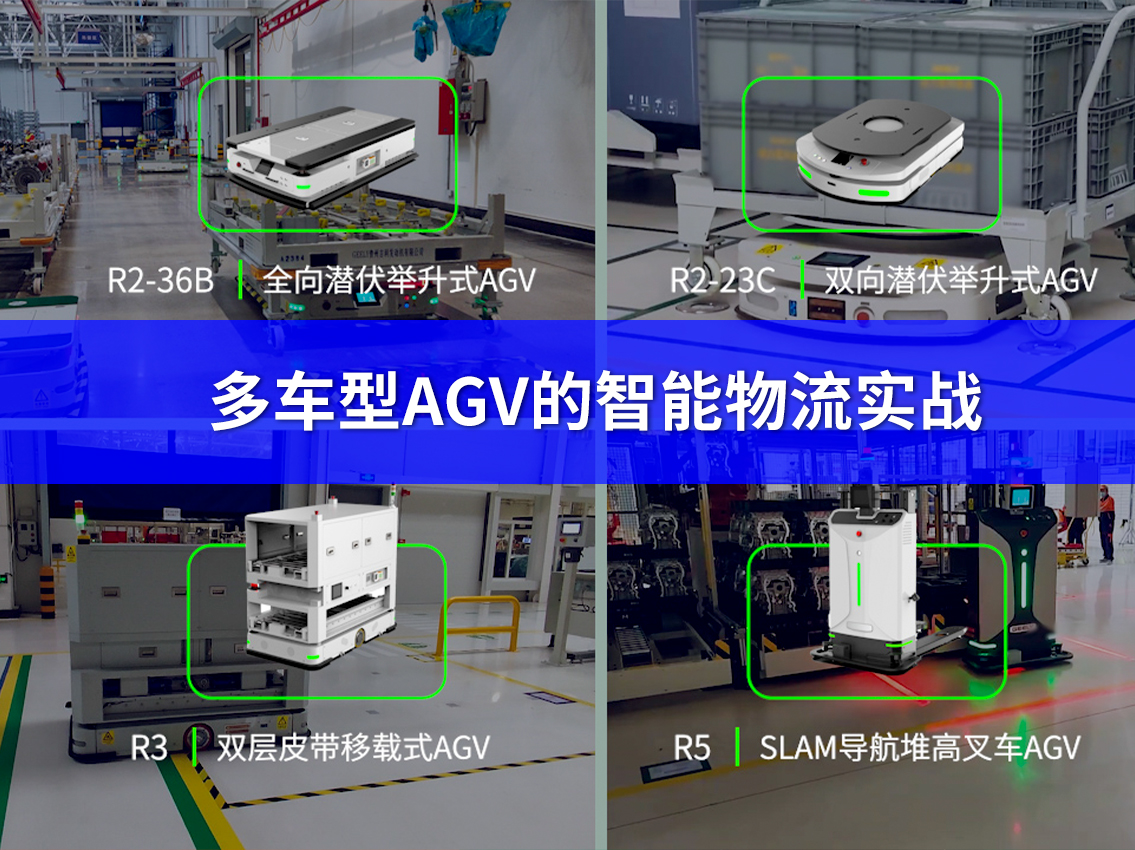
叉车式机器人,是在传统叉车结构基础上,结合导航定位、智能感知、自主控制等技术演化而来的自动化搬运设备。它保留了叉车的基本叉装结构和搬运能力,但不再依赖人工驾驶,而是依托激光雷达、视觉识别、环境感知系统,实现无人驾驶、自主路径规划和自动装卸操作。
根据作业需求不同,叉车式机器人可分为托盘堆高型、前移式、平衡重型等多个类型,适用于不同场景下的高位存储、长距离搬运和精确堆叠。

二、叉车式机器人能够解决哪些传统痛点?
1. 解决人工驾驶不稳定性
传统叉车对驾驶员依赖度高,操作人员水平差异大,导致搬运效率和安全风险难以控制。叉车式机器人具备高精度路径控制和作业稳定性,避免了人为误操作带来的碰撞、货损和工伤。
2. 应对高频次、高强度搬运任务
在长时间、多班次、高频率的搬运任务中,人工操作疲劳度高、易出错,而机器人可连续工作,节奏稳定,大幅降低劳动强度,提高整体搬运效率。
3. 提升多点协同调度效率
叉车式机器人可与仓库管理系统(WMS)、制造执行系统(MES)无缝对接,根据任务需求动态调度,适应多区域、多点位的货物分发、存取,实现柔性物流系统。
4. 适应复杂作业路径和环境
依托激光、视觉融合导航系统,叉车式机器人可实现动态避障、自动修正路径,在多障碍、复杂地形、混行作业环境中具备良好的运行能力,远优于传统固定轨道AGV。
三、典型应用场景解析
1. 成品仓出入库
在制造企业成品库中,叉车式机器人可实现托盘级货物的自动出入库操作,从对接产线自动接收货物,到搬运至指定货架存放,再到根据订单自动拣货出库,构建完整的无人化出入库流程。
2. 原材料自动配送
对于车间内部原材料补给环节,叉车式机器人可以根据物料拉动指令,从仓库中自动搬运所需托盘并送至指定工位,节省人工推车时间,提高生产节拍的匹配效率。
3. 高位货架堆叠作业
部分叉车式机器人具备堆高能力,适用于高层货架的堆垛与取货需求,特别是在立体仓库或高货架环境中,通过精准的升降控制和货叉定位实现高效、安全的垂直搬运。
4. 集装区和缓冲区对接
叉车式机器人可以灵活调度,在集货区与输送线、分拣区、码头等区域之间实现自动搬运对接,减少人工叉车频繁穿梭带来的效率低下与安全隐患。
四、关键技术构成详解
1. 导航定位技术
当前主流叉车式机器人多采用激光SLAM导航或激光+二维码混合导航方式,具备对复杂室内环境的建图与实时定位能力。部分机型配备3D视觉系统,可辅助精准避障与对位。
2. 路径规划与动态避障
通过内置控制系统,机器人可结合任务优先级、交通状态、障碍物情况进行路径实时规划。动态避障算法确保在人员、设备混行的环境中安全运行,防止突发碰撞。
3. 自动对位与叉取控制
叉车式机器人采用多轴联动控制技术,配合视觉或激光传感器,实现对托盘、货架、平台的精准对位与自动叉取操作,保障货物装卸的稳定性与安全性。
4. 调度与系统集成能力
叉车式机器人通过网络与调度平台连接,可接收任务指令、上传运行状态、反馈作业完成情况。调度系统具备任务分配、路径协调、优先级管理等功能,支持多台设备协同运行。
五、部署与选型时需考虑的要点
1. 作业货物与场景匹配
需确认货物是否为标准托盘、是否具备适合叉取的结构,作业场地是否留有足够叉车操作空间,是否存在高架、障碍物、复杂通道等不利因素。
2. 货架与平台的结构标准化
为实现自动对接,需要仓库货架、月台、缓冲平台等设施具备一定结构标准与精度,避免出现叉取高度误差、托盘错位等影响作业的问题。
3. 运行节拍与效率要求
需根据单次搬运重量、运行距离、任务频率综合评估机器人数量和机型配置,确保整体物流节奏与产线节拍相匹配。
4. 安全与人机混行设计
叉车式机器人必须满足电气安全、紧急刹车、防撞、声光报警等多项安全要求,且需对人流、叉车流动路径进行合理分区,避免运行干扰与事故隐患。





 在线咨询
在线咨询
 关注我们
关注我们 190-0660-1569
190-0660-1569 service@rijinjing.com
service@rijinjing.com 在线留言
在线留言